![]()
|
|
|
1. Ook: 3DLS; soms: Lidar. Een 3d laser scanner is een meetinstrument dat een object in 3 dimensies (3D) vastlegt als een grote puntenwolk (de pointcloud). Een object is bijvoorbeeld een gebouw, installatie, fabriek, onderdeel van infrastructuur. De pointcloud geeft de "as-built" situatie weer. Een pointcloud
is een enorm grote verzameling (afstands)metingen vanuit het 3D-scan-apparaat naar de omgeving van dit apparaat. Een
3D-scan geeft bijvoorbeeld exact alle afmetingen van een gebouw weer.
Uit een laserscan kan snel een verzakking of andere afwijking van het
bouwwerk ontdekt worden, wat een rol kan spelen bij de nieuwe inpassing, restauratie,
renovatie
of herbestemming.
Het ruwe databestand uit de scan kan door BIM-modelleurs
op een bepaalde manier worden gebruikt voor een 3D-model (solid model)
dat als basis dient voor het verdere BIM-proces.
Een 3d laser scanner is te beschouwen als een gecompliceerde laser-afstandsmeter (het scannen zelf wordt ook wel "meten" genoemd). Er worden
reflectorloos zeer veel opnamen achtereen
gemaakt, vaak tienduizenden of honderdduizenden per seconde, vanuit allerlei hoeken
vanaf het scan-apparaat. De scanopnames (laser-metingen) worden aan elkaar gekoppeld tot een
puntenwolk die uiteindelijk een volledig 3D-beeld levert van de omgeving.
Met behulp van de ingebouwde digitale camera worden kleurenopnamen gemaakt die zijn samen te voegen met de metingen, waardoor een realistisch beeld ontstaat. Op die manier kun je uiteindelijk bijvoorbeeld op punten op de digitale "foto" klikken om afstanden e.d. te weten te komen.
Veel objecten zijn niet in hun geheel vanuit één positie van de scanner te bereiken. Om een
correct driedimensionaal beeld te verkrijgen, wordt de scanner verplaatst
en vanuit die positie geven de neuwe scanopnames een volgende pointcloud.
Toepassingen
Met de pointcloud kun je bijvoorbeeld 2D- en 3D-tekeningen maken, 3D-modellen voor 3D-printen en BIM-modellen. Iets
specifieker:
- visualisaties (o.m. BIM, ontwerp, facility management, marketing, voorstellen, infrastructuur, "fly-throughs", geologische structuren, topografische
mappen, bijna-bouwtekeningen, animaties)
- "momentopnamen", voortgangsaspecten (o.m. voortgang
bij bouw of verbouw, installaties in fabrieken, archeologie, bouwhistorie, gevelrestauratieplan, forensische opnamen,
orthofoto)
- vormcontrole (o.m. controleren van de realiteit met
3D-modellen; verandert een object van vorm).
Werkwijze
Bij het 3D scannen is de werkwijze grofweg als volgt:
- maak een scanplan (wat wil ik scannen, waarom 3D, wat ga ik ermee doen
(wat moet er met de pointcloud verder gebeuren), welke objecten moet ik scannen,
waar ga ik staan (welke scanposities zijn er om het geheel correct te hebben), welke scanner is het beste in dit
geval)
- maak de scan (het veldwerk); de gegevens worden opgeslagen op SSD (snelle interne schijf), SD-kaart of USB-stick
- meer scans zijn nodig als niet alle objecten vanaf één scan-locatie gemeten kunnen
worden (dat is vaak zo); omdat elke scanpositie een pointcloud oplevert, bestaat
de ruwe laserscandata vlak na het scannen uit een verzameling losse pointclouds
- breng de gegevens over naar de laptop om verder te verwerken (voor het fysieke transport van de metingen naar de laptop wordt vaak SD of USB gebruikt)
- maak een geregistreerde pointcloud: koppel alle losse scans aan elkaar (met speciale
software; de losse pointclouds worden ten opzichte van elkaar correct
gepositioneerd)
- kleur in (als er foto's zijn gemaakt, met de "scanner" vanaf dezelfde positie als van waaruit de scan is gemaakt; met de foto's kan ieder meetpunt de juiste kleurwaarde
krijgen, zie bij HDR)
- bewerk de gegevens met speciale software en het resultaat is een gekleurde pointcloud, view,
orthofoto, 3D-mesh (vlakkenmodel) enz.
- bij renovaties zijn vaak meer scans nodig, in de verschillende stadia
van de renovatie (omdat het bouwwerk veranderd is)
Hoe werkt de 3D laser scanner
De werking van de scan is ongeveer als volgt:
- met snelle pulsen of een continue straal wordt de omgeving van de
scanner ingemeten
- scanner beweegt bij het inmeten langzaam om zijn verticale as (dus horizontale
beweging, 360 graden) en de "straal" draait via een spiegel in het rond (verticale
beweging, meestal 270 graden)
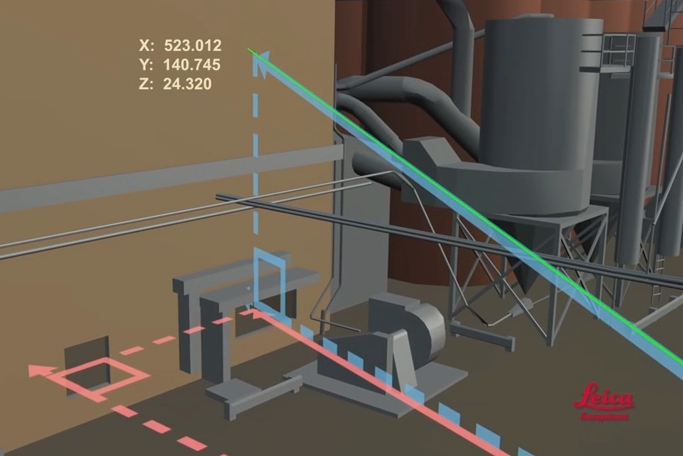
- als de straal een object raakt, wordt de afstand van scanner tot
objectpunt gemeten en de hoek ten opzichte van de scanner
- de coördinaten van het zojuist gemeten punt worden berekend en
vastgelegd
- soms worden "targets" gebruikt (plaatjes met zwarte en witte vlakken) voor een betere terugkaatsing/registratie
- honderdduizenden of miljoenen van die metingen vormen de pointcloud.
Parameters, aandachtspunten
Er zijn verschillende soorten scanners voor verschillende doelen.
Aandachtspunten bij de keuze van een scanner zijn o.m.:
- wat is het doel (wat wil ik scannen)
- nauwkeurigheid (hoe verfijnd moet gemeten worden; de nauwkeurigheid
van 2 mm geldt vaak alleen maar voor een afstand 25 m)
- welke afstanden
- snelheid (scan-rate, bijvoorbeeld 50.000 scans/sec; tot 1 miljoen scans/sec; vooral belangrijk bij omvangrijke scans en bij grotere afstanden)
- resolutie van de camera
- eigenschappen van het object (sommige apparaten hebben moeite om een donker
of een helder oppervlak goed te meten)
- binnen of buiten meten (meten met tegenlicht van de zon is moeilijk)
- wel/geen stabilisatie nodig (kan ik stabiel staan of niet, ofwel is een scheefstand-sensor nodig)
- eisen van de klant
- in handbagage (sneller in- en uitchecken bij luchthavens).
Voordelen 3D scannen
- basis voor 2D- en 3D-tekenwerk e.d.
- je maakt een volledige en foutloze opname (binnen de marge van de
nauwkeurigheid en vanuit de gekozen scanposities)
- je meet heel veel (de pointcloud en de softwarematige behandeling geven uiteindelijk een gedetailleerd beeld van het object)
- later zijn producten bij te maken (de pointcloud kan behouden blijven en later aanvullende producten
geven; de software kan bijvoorbeeld het perspectief
verwijderen)
- grip op complexe vormen
- documentatie (situatie "as built" en/of juist situatie achteraf; controle achteraf)
- nulmeting (bijvoorbeeld bij verbouwingen of restauraties).
Nadelen 3D scannen
- er zijn nauwelijks standaards (pointclouds in bijvoorbeeld formaat PTS, PTX, PCG,
E57 en ZFS); veel software is nogal begrensd wat betreft invoer en moet
geconverteerd worden
- de kwaliteiten van de scanners verschillen nogal, vooral op wat grotere
afstanden
- de scanners zijn nog behoorlijk duur
- je moet van te voren goed weten wat je wilt (maar dat geldt voor alles
eigenlijk)
- het maken van het scanplan, het omgaan met de 3D scanner en het verwerken van
de gegevens vereist kennis en ervaring; maar scanner en software kunnen eventueel gehuurd worden
én al het werk kan door een 3D-scan-bureau worden uitgevoerd (alternatief:
"training on the job").
Servicebureaus, software, merken
Specifieke 3d laser scanner servicebureaus zijn o.m.:
PelserHartman en 3DLS.
Als software zijn pointclouds via plug-ins te gebruiken in o.m.:
Revit, Autocad, MicroStation, SketchUp Pro, Leica CloudWorx, Aveva PDMS, SmartPlant 3D, 3ds Max, Maya.
Merken 3D scanners zijn o.m.:
Faro, Optech, Leica, Z+F.
Kijk ook eens op 3D
Makers Zone.
3d laser scanner in een te scannen ruimte (faro):  |
een blik op de "straal" en de (snel ronddraaiende) spiegel in het midden (faro):  |
het meten van een scanner, hoeken en coördinaten; klik voor groter (leica geosystems):  |
 |
vaak zijn meer scanposities nodig; klik voor groter (leica geosystems):  |
een gekleurde pointcloud; klik voor groter; klik voor groter (pelserhartman):  |
orthofoto van een kerk; klik voor groter (pelserhartman):  |
een 3d-mesh opname aan de han dvan pointcloud (greenhatch-group):  |
één van de resultaten van 3d laser scanning: van elk punt is tot elk ander punt de afstand te bepalen; klik voor groter (leica geosystems):  |
een ander voorbeeld van een gescande omgeving; klik voor de volledige afbeelding (3dls):  |
Documentatie
- Whitepaper
3D Scannen Basics (van PelserHartman)
- Leica 3D-scanner P30-P40 voor integratie met BIM (van Leica Geosystems)
-
BIM
in the pointcloud (artikel TVVL van ir. Jaap Westerik, via 3DLS)
De term Lidar is afkomstig van LIght en raDAR, later
werd dit LIght Detection And Ranging.
Met dank aan PelserHartman,
waarvan zeer veel informatie is verkregen, en 3DLS.
Kijk ook eens op Tijdlab
voor bijvoorbeeld 3D-scannen en Virtual Reality.
Zie ook digitalisering
(technologische ontwikkelingen).
Verg. afstandsmeter, totalstation.
2. Een 3D laserscanner is een inleesapparaat voor (kleinere) objecten die later
met een
3D-printer
kunnen worden gekopieerd.
Voor kleinere (maar ook grote) objecten zijn er eventueel 3D-scanners die je in
je hand houdt tijdens het scannen.